高品質閥門專業制造商
全套工程閥門解決方案
服務熱線: 021 - 58108666

一個自動調節系統的目的在于:當輸入量是xi,反饋量是xr時,使自動化過程EA的輸出量xe保持不變,這就是調節閥工作原理,如圖1所示。
當由于擾動量的作用使輸出量xe改變時,變送器T通過反饋量xr,把這個改變的信息送給調節器R;調節器按照xi與xr的極限偏差值進行調節,產生控制量xc;xc通過執行元件EE作用于自動化過程;在xc的作用下,xm發生變化,到過渡過程結束時,xm的變化補償了干擾的影響,使被調參數重新回到給定值(這僅適用于無極限偏差的自動調節系統)。
圖2所示為按極限偏差調節溫度的自動調節系統。實際上遇到的自動化系統比較復雜,但從執行元件來說,問題是一樣的。因此,現僅就這個自動化系統來進行研究。
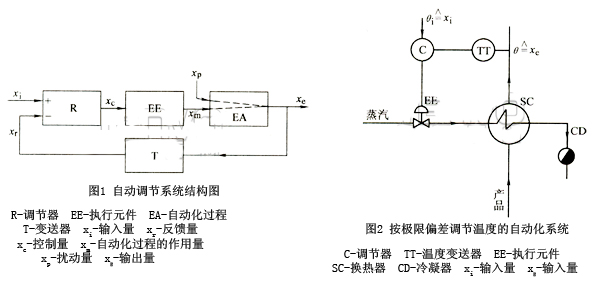
首先可以看出,系統中有一個執行元件,通過它作用于被調節對象。根據控制信號值,執行元件改變自動化過程的輸人量。實際上,圖1中信號xm是調節因素,在大多數情況下它是流量(空氣、蒸汽、水、石油化工產品等)。調節流量最常用的執行元件是調節閥。
其次可以看出,自動化儀表包括變送器、調節器和執行元件。與被調節對象在兩處連接,即在進口處與執行元件連接,在出口處與變送器連接。在自動化系統設計中,這兩種連接使得設計復雜化。變送器只需從樣本中選擇。調節閥的選擇必須進行大量計算,要考慮各個方面因素,如驅動方式、結構、工藝、經濟性等。
如圖3所示,調節閥由兩部分組成:執行機構和調節機構。這是一個簡單明了的調節閥工作原理圖。
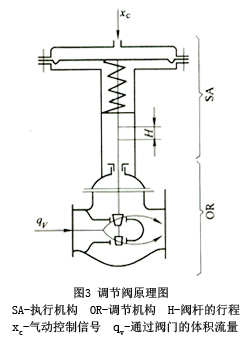
調節閥的輸入是從調節器來的信號xc,一般取0.02~0.1MPa的氣動信號或者是電動信號,而輸出是工藝流程的流量。在氣動信號xc的作用下,執行機構的閥桿移動H(mm),這同時也是閥門的輸入。閥桿行程H使閥瓣處在不同的位置,導致通過閥門的介質流通面積改變,從而有了不同的流量qv。由此得到通過閥門的流量與輸入信號xc的關系。
在自動化系統中,調節閥具有一定的靜態特性和一定的動態特性。調節閥的這些特性影響著自動化系統的穩定性和自動調節過程的品質。















HL電動籠式調節閥")
HL氣動籠式調節閥")






















































